

FATORES QUE AFETAM A PRECISÃO / APLICAÇÕES GPS / SISTEMA DIRECIONAL DO RECEPTOR GPS:
Os receptores GPS possuem uma tela com o índice EPE (Estimated Position Error - Erro Estimado de Posição), que é o erro entre a posição fornecida pelo GPS e a real, que atualmente está entre 5 e 15 metros (ou até menos), em boas condições de recepção, nos aparelhos civis.
Este erro ocorre em função dos seguintes fatores:
- qualidade do receptor;
- erro de relógio no receptor: - a precisão do tempo é essencial pois, um erro de micro segundo (10-6 segundos) no registro do lapso de tempo da transmissão até a recepção, resulta numa diferença de 300 metros;
- quantidade e nível dos sinais recebidos, devido a qualidade geométrica dos satélites;
- fatores causados pelas camadas da atmosfera, troposfera e ionosfera, pois as freqüências dos sinais dos satélites serão afetadas/refratadas, devido às núvensde partículas carregadas de íons e camadas de vapor de mercúrio e vapor d`água;
- multicaminhamento (reflexão / deslocamento) da onda portadora do sinal, devido a obstáculos naturais ou artificiais.
Os erros ocorrem em um raio correspondente ao valor do EPE e é oscilante, ou seja, em um raio de X metros. O ponto poderá se localizar em qualquer posição dentro deste raio, alterando a cada segundo.
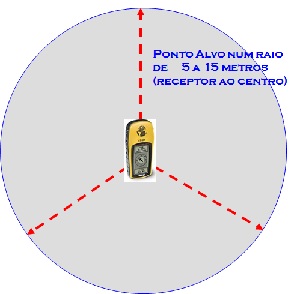
imagem: vaztolentino.com.br
DOP (Dilution Of Precision):
É a "geometria dos satélites", ou seja, a localização dos satélites em relação uns aos outros sob a perspectiva do receptor GPS.
Este fator que é conhecido como “diluição de precisão”, torna-se importante principalmente quando se utiliza o receptor GPS próximo a edifícios, montanhas, vales, cânions ou florestas.
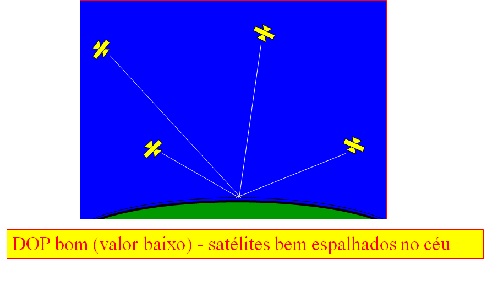
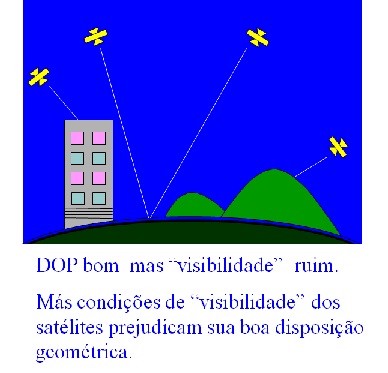
imagem: vaztolentino.com.br
APLICAÇÕES DO SISTEMA GPS:
.Navegação aeronáutica;
.Navegação náutica;
.Navegação terrestre no campo (trekkings, expedições em veículos 4 X 4);
.Navegação terrestre urbana ( carros com sistema GPS para orientar o deslocamento em grandes cidades, com mapas detalhados de endereços das cidades e pontos úteis como restaurantes, hotéis, shoppings, etc);
.Agrimensura;
.Agricultura (máquina agrícula dotada de sistema GPS, armazena dados relativos à produtividade da lavoura da
área trabalhada);
.Guarda de florestas;
.Trabalhos de prospecção e exploração de recursos naturais;
.Geógrafos e geólogos;
.Arqueólogos;
.Policiais e Bombeiros;
.Monitoramento de caminhões de carga, trens, etc;
.Localização para resgates e buscas (guiar helicópteros e ambulâncias);
.Lazer (caminhantes, ciclistas, balonistas, pescadores, ecoturistas) e viajantes em geral.
LIMITAÇÕES DO SISTEMA GPS:
O receptor GPS precisa de visão do céu para operar.
Os sinais de satélite não penetram em vegetação densa, vales estreitos, cavernas ou na água.
Montanhas próximas ou edifícios também afetam a precisão.
Para o uso em veículos, deve-se providenciar uma extensão para fixar antena externa ou posicionar o receptor junto ao pára-brisas, sendo desejável um adaptador para ligá-lo ao acendedor de cigarros.
Sistema Direcional do receptor GPS:
O sistema direcional do receptor GPS informa a direção angular de deslocamento (heading - HDG) e também a direção angular correta que devemos seguir (bearing - BRG) para atingir um ponto alvo no globo terrestre.
Ambas as direções são medidas em graus, e calculadas em relação ao Norte de Referência, que poderá ser o Magnético ou o Verdadeiro, dependendo da configuração do aparelho receptor.
- O sistema direcional usa uma “seta” ( ----> ) para indicar a direção exata a ser seguida para atingir o
ponto alvo (BRG).
- O direcionamento do GPS NÃO é baseado em um sistema magnético como as bússolas convencionais,
ou seja, não é utilizado o magnetismo terrestre para orientar a “seta”.
- Isto posto, o sistema direcional do receptor GPS não funciona quando ele está parado, necessitando de
uma velocidade acima de 3 Km/h (caminhada normal) para operar.
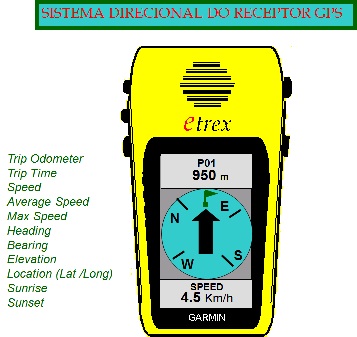
imagem: vaztolentino.com.br
Informações básicas fornecidas por um aparelho receptor GPS:
Location (Lat / Lon) - Coordenadas geográficas ou geodésicas do ponto onde se encontra o viajante. Pode ser expressa de várias formas. A mais comum é GGMMSS (Graus, Minutos e Segundos).
Elelvation - Altitude do ponto em que se está, em relação ao elipsóide de revolução, que representa matematicamente o formato físico do planeta Terra. Não coincide com a altitude em relação ao nível do mar.
Trip Odometer - Odômetro da viagem (distância real percorrida desde o início do deslocamento);
Trip Time - Tempo total da viagem, desde o início do deslocamento, incluindo paradas;
Speed - Velocidade atual no deslocamento;
Average Speed - média de velocidade desde o início do deslocamento;
Max Speed - Velocidade máxima atingida desde o início do deslocamento;
Heading - Ângulo (azimute) da "proa" do viajante em relação ao norte de referência (norte verdadeiro ou magnético);
Bearing - Ângulo (azimute) entre o norte de referência (verdadeiro ou magnético) e a direção correta para o ponto que se deseja deslocar. Obs.: quando o Heading (ângulo de proa) é igual ao Bearing, o viajante está navegando na direção correta para o ponto destino (porém, isso só se aplica para plataforma fixa, ou seja, na terra (a pé, de bicicleta, de carro, etc), mas não se aplica para plataforma móvel, ou seja, água e ar (barcos e aviões)).
Sunrise - Hora/minuto/segundo em que o Sol "nascerá" no ponto em que se encontra o viajante.
Sunset - Hora/minuto/segundo em que o Sol "morrerá" no ponto em que se encontra o viajante.
Distance - Distância em linha reta do ponto em que se está, até ao ponto destino (ou seja, até ao próximo ponto em que se deseja atingir). Se estamos em plataforma fixa, ou seja em terra (a pé, de bicicleta ou de carro) o valor do Trip Odometer quase sempre será maior (devido ao desvios dos obstáculos) do que o valor do Distance (distância em linha reta).



